- 0
- 8
- 分享
- 2025-04-17 19:47
当大家看到文章时候肯定会好奇,为什么yolo都到v11了,常用也是v8为什么楼主会选择v5呢?
其实不是楼主不想用,而是因为海康python的解释器版本是3.7,而这个版本只支持v5以及v5以下的
首先安装yolov5库(这个自己研究)
在python脚本头部新增导入库
from yolov5 import YOLOv5
载入模型
model=YOLOv5("D:/Program Files/yoloHIK/weight/best.pt",device="cpu")#这里的best.pt是我自己用yolov5提前训练好的模型,没的也可以用官网的#几个如yolov5m.pt,yolov5s.pt等
获取当前彩色图片img(cv2可处理格式,上一篇文章有教转换方法)
face=model.predict(img)图片预测
以下面图片为例子
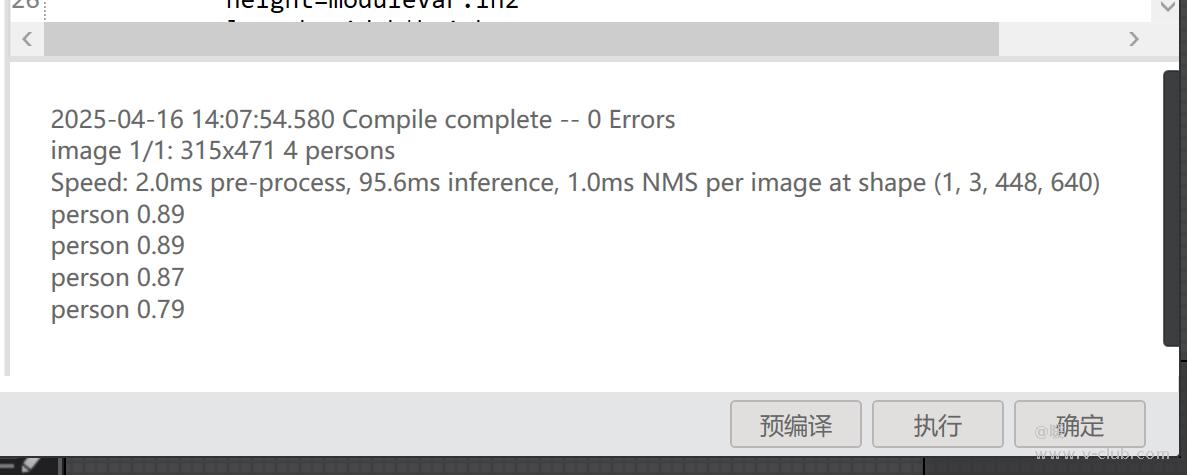
预测完后即可获取匹配到的相关参数
平台输出结果如下
再将结果绘至于图片上(以找到人脸为例子)
img1=img.astype(np.uint8)#需要转换,不然用cv绘制会报错(如果要绘制中文需要转pillow画好再转cv)
for *xyxy,conf,cls in face.xyxy[0]:
label=f'{model.model.names[int(cls)]} {conf:.2f}'
PrintMsg(label)
if(model.model.names[int(cls)]=='person'):
cv.rectangle(img1,(int(xyxy[0]),int(xyxy[1])),(int(xyxy[2]),int(xyxy[3])),(0,255,0),2)
cv.putText(img1,label,(int(xyxy[0]),int(xyxy[1])-10),cv.FONT_HERSHEY_SIMPLEX,0.5,(0,255,0),2)
最后将img1转成数据流在vm上显示输出即可
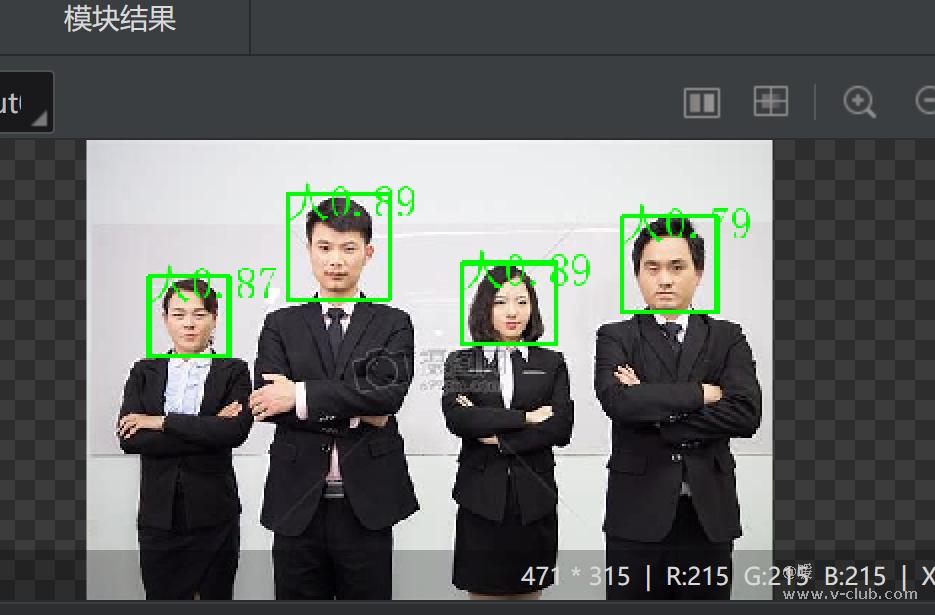
下面是我用软件测试的结果(用的自己训练的模型,然后我是转piilow再转回来的效果)
最后总结下不足的地方,就是载入模型这句,如果不是静默模式,这句话第一次运行时候会导致软件打不开,因此如果要正常使用需要在静默模式下先打开脚本点确定,软件才能运行,希望开发人员能早日修复这个bug



您好,请问如何将yolo输出结果显示到VM?VM模块封装不是用C++实现的吗?怎么才能在VM中写python代码呢
求作者指导一下yolov5的库如何导入,我下载了各种yolov5版本,from yolov5 import YOLOv5一直报错
统一回复下,倒库用anconda进行导入,创建py3.7的环境,再将yolov5库导入到(直接导入库与库很容易会有冲突,要自己反复调库版本是个深坑,我第一次就是这么搞的)
路径是这个"D:\Program Files\VisionMaster4.4.0\Applications\ModuleProxy\x64\Lib\site-packages"
导完后会有1个报错,cannot import name 'OrderedDict' from 'typing'这个网上有教怎么改
脚本里面导入前加这个sys.argv=['']
vm要选择静默执行,软件启动后先打开脚本,点确定,即可实现上面效果

- 1

 【技术分享】VM运行界面之清空图像2026-06-10
【技术分享】VM运行界面之清空图像2026-06-10 PoeLink-AI实施小助手2026-06-18
PoeLink-AI实施小助手2026-06-18 使用VM算法识别屏幕2026-06-05
使用VM算法识别屏幕2026-06-05 认证刷题与模拟考试系统2026-06-12
认证刷题与模拟考试系统2026-06-12 全国总决赛获奖名单公布!第四届“启智杯”机器智能大赛大奖花落谁家?2026-05-29
全国总决赛获奖名单公布!第四届“启智杯”机器智能大赛大奖花落谁家?2026-05-29
 浙公网安备 33010802013223号
浙公网安备 33010802013223号