首页
案例
问答
V学院
活动
认证
启智杯大赛
登录
注册
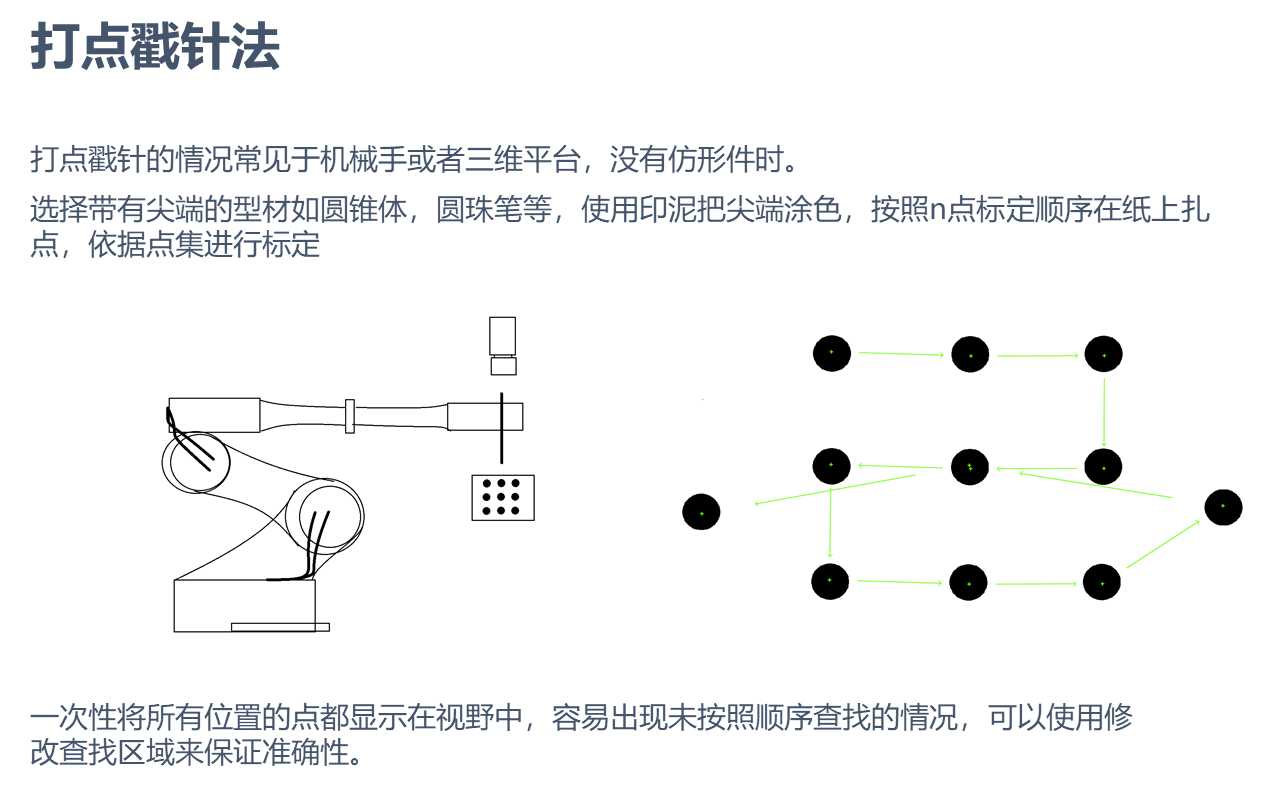
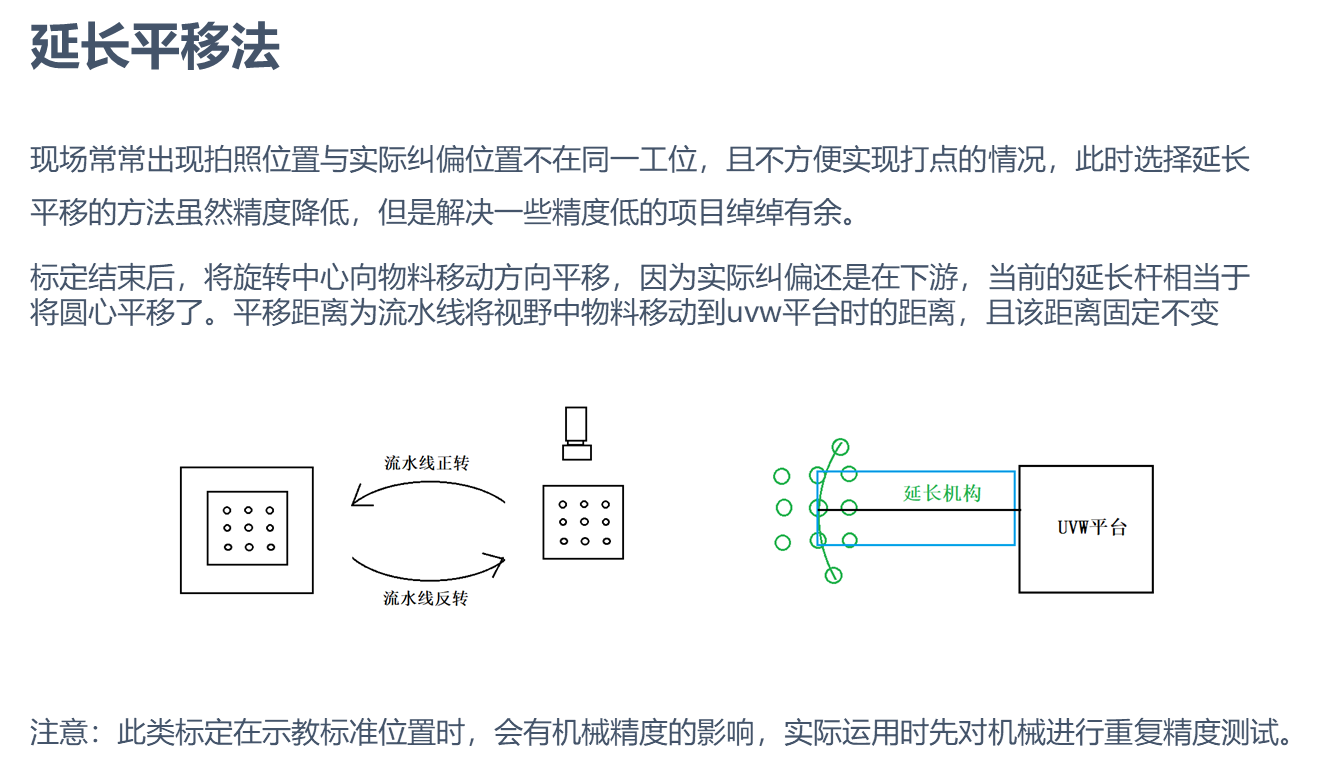
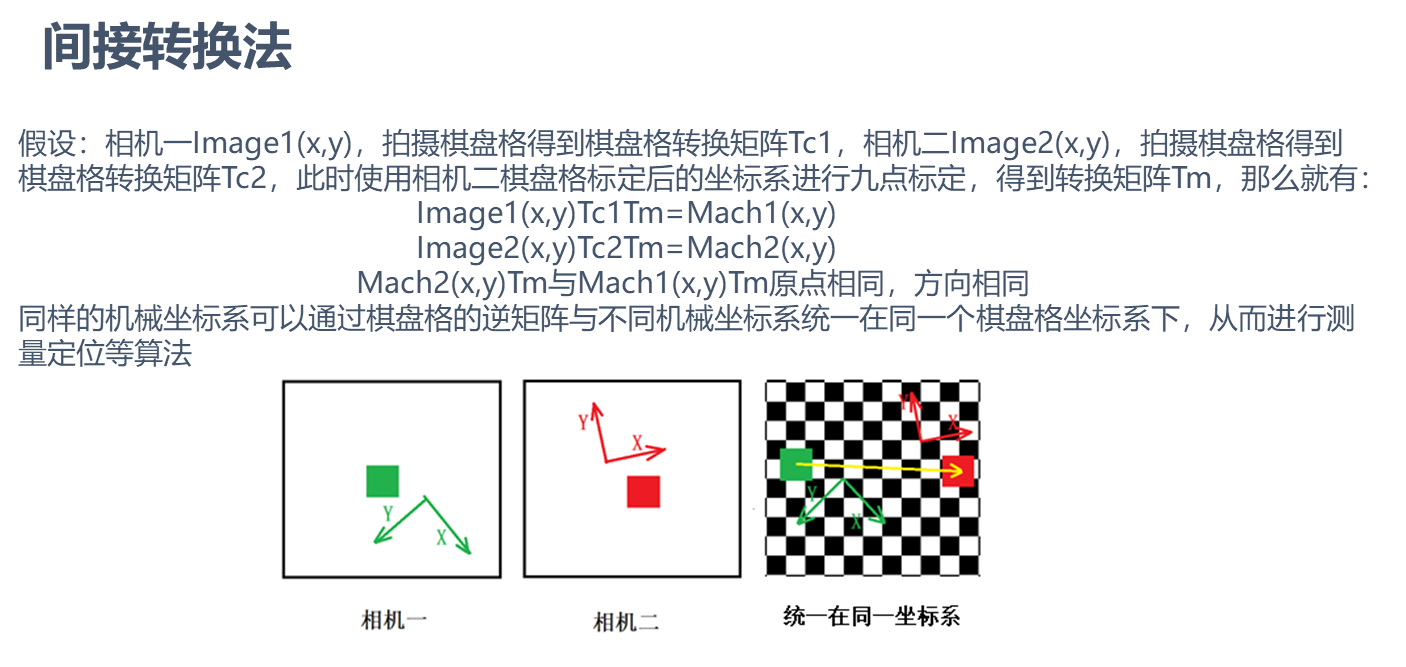
常见的标定方法简介
针对不同现场环境,选择合适的标定方法
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:
v-club@hikrobotics.com
进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
上一篇
视觉硬件的选择-标定板
下一篇
VM模块-相机映射
评论请先登录
登录
全部评论
1
Vuser_113699
相机内部棋盘格坐标系,指的什么?
2023-11-02 10:21:40
浙江省
回复
0
操作频繁,请输入验证码校验
1
Lv.0
--
0
关注
0
粉丝
0
创作
0
获赞
所属专题
各类标定,都在这里
9篇
常见的标定方法简介
VM应用之平移旋转标定使用
3D轮廓仪如何进行系统标定
双目相机标定原理
工程经验系列:视觉定位(标定设计,及应用)
浅谈VisionMaster中的畸变矫正工具(以及VM标定板二的灵活应用)
相机旋转,代替机械爪旋转,标定旋转中心。
【共享学习】单相机位与多相机定位分析
平移旋转标定模块与绝对坐标
相关阅读
【形状匹配算法系列】从NCC到轮廓匹配:工业视觉的"定位之争",到底争的是什么?
2026-05-19
浏览 0
【技术分享】VM运行界面之清空图像
2026-06-10
浏览 0
使用VM算法识别屏幕
2026-06-05
浏览 0
认证刷题与模拟考试系统
2026-06-12
浏览 0
移动机器人工程师培训与认证安排-26年6月
2026-05-18
浏览 0
操作频繁,请输入验证码校验
请升级浏览器版本
您正在使用的浏览器版本过低,请升级最新版本以获得更好的体验。
推荐使用以下浏览器
Chrome
Edge
Firefox







 浙公网安备 33010802013223号
浙公网安备 33010802013223号