



文章专题-【开发有道系列】惊艳上线
本文介绍了【开发有道:解码大厂实战核心经验】专题的设立初衷与内容规划。该专栏聚焦大厂实战中的关键技术场景,目前已发布多篇深度文章,分别涵盖算法模块开发、内存泄漏排查与跨语言调用三大实战方向。未来将持续更新分布式、高并发等主题,致力于为开发者提供体系化、可落地的实战经验,助力技术成长与问题解决能力的提升。
- 3765
- 10
- 2
- 2026-01-26
秒懂VisionMaster!「VM助手」上线,有问必答的AI导师来了!
“VM助手”是海康机器人倾力打造的AI智能问答机器人,当前的核心使命是成为您VisionMaster软件学习和使用的超级搭子!他专注VisionMaster实战指导,快速解答高频问题!


- 26607
- 31
- 13
- 2025-06-26
海康机器人机器视觉工程师认证流程解读(2025年版本)
解读认证对象、认证体系、认证流程、认证报名、认证考核等内容


- 40849
- 33
- 37
- 2025-02-18
【YOLO11实战项目】OpenCV+CUDA编译保姆级教程
本文将详细介绍在Windows环境下编译支持YOLO11开发的带CUDA的OpenCV。整个过程分为环境准备、源码下载、CMake配置、编译安装、验证测试五个步骤。

- 20158
- 33
- 6
- 2025-02-17
【2D算法系列】机器视觉核心算法之N点标定
学校和互联网上学习资料局限于计算机视觉领域,能落地工业领域的算法寥寥无几,且相关算法原理语焉不详、乏善可陈,或示例代码缺少关键实现、谬误百出,故作【2D算法系列】系列课程,掰开揉碎了讲解机器视觉领域核心算法,力争为从业者提供严格贴近工业应用场景的、高质量的国际前沿算法剖析。

- 17316
- 57
- 9
- 2025-02-07

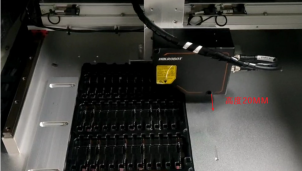
博图光电3D激光轮廓仪焊锡检测方案
基于3D激光轮廓仪实现高精度检测,主要检测锡脚:少锡、连锡、拉尖偏位等,解决人工检测速度慢、没有标准化规范,不容易量化数据缺陷等问题。

- 479
- 0
- 2026-07-24
海康机器视觉项目分享:电子制造业
当机器学会"看见",产线质检从人工经验走向AI智能


- 783
- 0
- 2026-07-16
博图光电鲜奶字符缺陷检测方案
乳制品包装一般应用油墨形式的来进行生产标签的喷印,应用现场由于喷头的清洗,机台的震动还有受高湿度的影响,喷印的字符会出现残缺、畸变和打花等情况。产品零售端对生产三期信息严格把控,不允许出现残缺,模糊,脏污等情况,因此导入博图视觉检测方案。
- 1148
- 0
- 2
- 2026-07-08


3D产品-HiviewerV2.0客户端介绍说明
①Hiviewer客户端软件介绍②Hiviewer客户端软件使用(快捷工具、图像预览)③软件开发包简介以及错误码对应的常见排查方法④常见的注意事项

- 907
- 0
- 2026-07-01
话术-用AI协助编写VM3D脚本模块的代码
你是不是总在因为不会代码而苦恼,又总因为靠AI写的代码直接放在脚本模块中无法快乐的一次即成而抓狂,快来试试这个话术吧!可以解决你百分之九十九点九九的小代码需求。


- 1196
- 8
- 2026-06-29
7月8日14:00-16:00,V社区KOL带你探秘汽车展
从传感器到算法,从检测到引导,KOL带你一站读懂海康机器人如何驱动汽车智造
.jpg)
- 1088
- 0
- 1
- 2026-06-26
- 1
- 2
- 3
- 4
- 5
- 6
- 36

 浙公网安备 33010802013223号
浙公网安备 33010802013223号