Mr_VisionMaster Lv.5
34
文章
2
案例
182
回答
433
获赞
270
粉丝
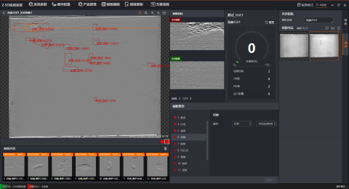
突破表面缺陷检测瓶颈,海康机器人2.5D视觉检测系统实现“软硬一体”高效检测
在工业检测领域,海康机器人推出基于2.5D视觉技术的软硬一体化解决方案,突破传统检测对细微、多类缺陷的识别瓶颈。该方案采用多特征光源成像,可清晰凸显高反光与漫反射表面的各类瑕疵,一套系统实现多缺陷同步检测,提升效率并降低硬件成本。系统高度集成照明、成像与运算链路,结合智能软件平台,提供引导式操作、AI缺陷分类及明暗瑕疵检测等工具,支持边生产边调试,大幅降低技术应用门槛,助力企业实现高质量、高效率的智能检测部署。
3522 3 2026-04-09
文章专题-【开发有道系列】惊艳上线
本文介绍了【开发有道:解码大厂实战核心经验】专题的设立初衷与内容规划。该专栏聚焦大厂实战中的关键技术场景,目前已发布多篇深度文章,分别涵盖算法模块开发、内存泄漏排查与跨语言调用三大实战方向。未来将持续更新分布式、高并发等主题,致力于为开发者提供体系化、可落地的实战经验,助力技术成长与问题解决能力的提升。
2813 9 2 2026-01-26
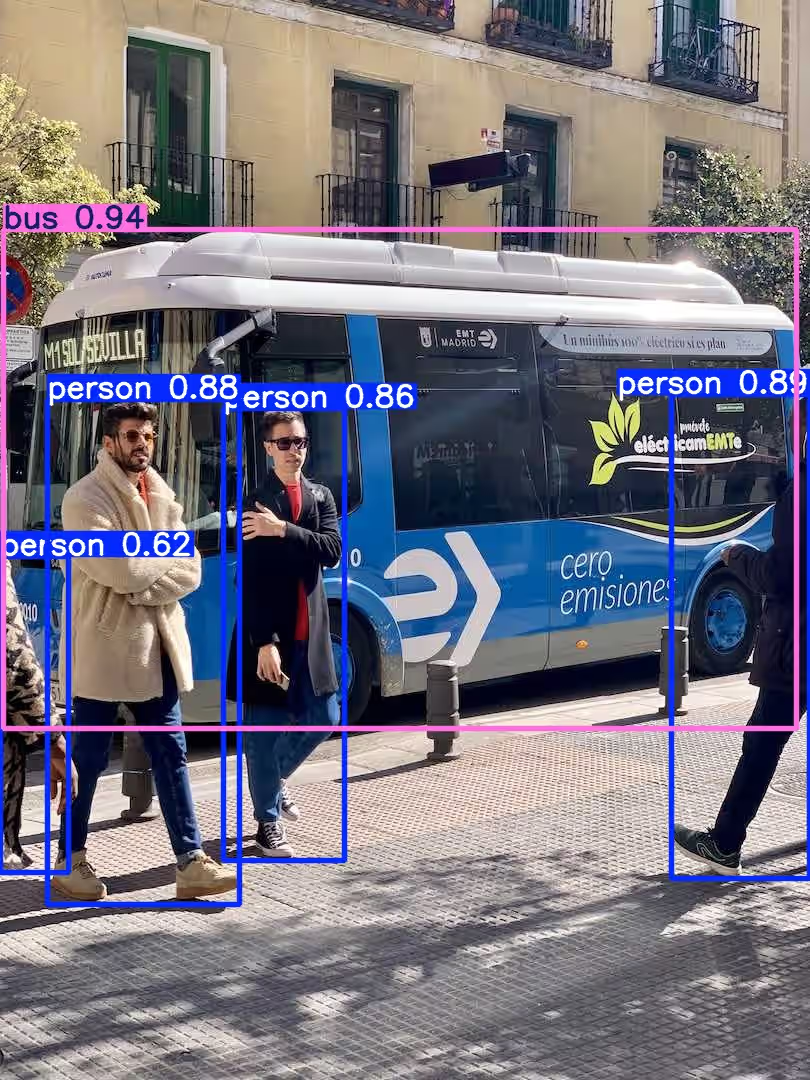
【YOLO11实战项目】OpenCV+CUDA编译保姆级教程
本文将详细介绍在Windows环境下编译支持YOLO11开发的带CUDA的OpenCV。整个过程分为环境准备、源码下载、CMake配置、编译安装、验证测试五个步骤。
18208 32 6 2025-02-17
【2D算法系列】机器视觉核心算法之N点标定
学校和互联网上学习资料局限于计算机视觉领域,能落地工业领域的算法寥寥无几,且相关算法原理语焉不详、乏善可陈,或示例代码缺少关键实现、谬误百出,故作【2D算法系列】系列课程,掰开揉碎了讲解机器视觉领域核心算法,力争为从业者提供严格贴近工业应用场景的、高质量的国际前沿算法剖析。
15609 46 9 2025-02-07
【形状匹配算法系列】从NCC到轮廓匹配:工业视觉的"定位之争",到底争的是什么?
工业视觉中,NCC灰度匹配易受光照、遮挡、极性反转干扰,因“看像素”而非“看形状”。形状匹配改用边缘梯度,对光照天然鲁棒,并通过几何投票(改进的广义霍夫变换)定位,能容忍遮挡、缺角及背景变化。原版GHT计算慢,工业版通过方向离散化、预计算R-table、金字塔搜索和并行化,将匹配时间压至10–20毫秒。形状匹配适用于有明确轮廓、光照多变或部分遮挡的场景;不适用于无清晰边缘或纯纹理匹配。它是工业定位的默认正解,性价比高且无需GPU。
761 6 3 2026-05-19
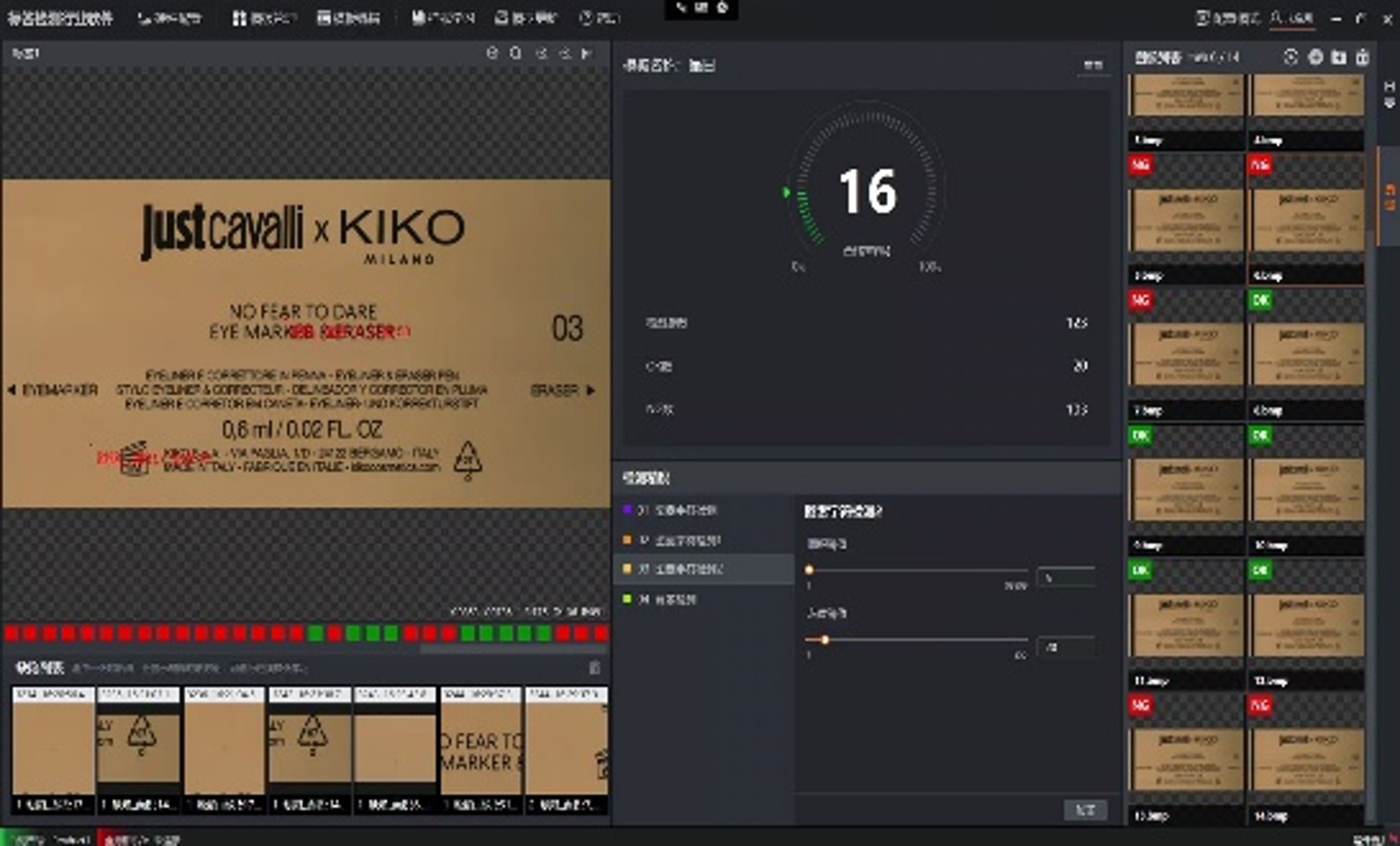
突破标签印刷缺陷检测瓶颈,海康机器人推出高效易用型解决方案
本文针对标签印刷缺陷检测中字符复杂、缺陷多样、上线周期长等行业痛点,介绍了海康机器人推出的高效易用型操作软件。该软件通过引导式操作、多功能检测模块及传统算法方案,实现快速部署与自适应校正,显著提升检测效率并降低人工依赖,适用于工业制造、印刷与电子等行业,助力企业高质量生产。
3207 6 4 2026-03-10
【计算成像】超越像素:计算光学与下一代工业视觉系统
计算光学正在颠覆工业检测的“不可能三角”——通过将光学系统从“完美记录设备”转变为“信息编码器”,用算法解码突破物理极限。波前编码技术可扩展景深10-20倍,让PCB检测告别机械对焦;傅里叶叠层成像实现0.39Å分辨率,使半导体缺陷无处遁形;光度立体视觉精准重建表面形貌,让金属划痕无所遁形。这不是妥协,而是一场从“硬件完美主义”到“算法增强主义”的范式革命。当光学遇上计算,工业视觉正从“看得清”迈向“看得懂”的智能时代。
1759 4 1 2026-03-09
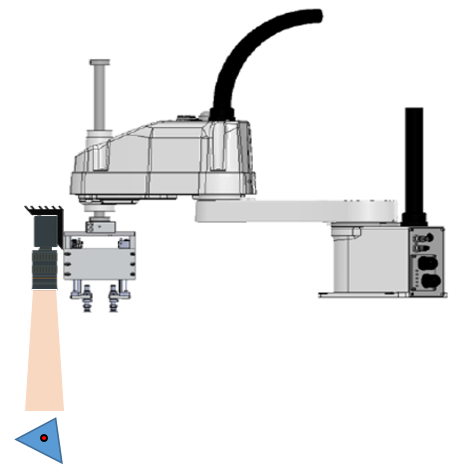
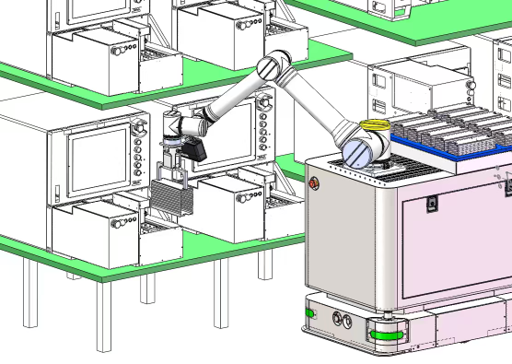
【具身智能系列】复合机器人+SC5000XM硬软件一体行业解决方案
随着具身智能技术的快速发展,复合机器人的定位抓取需求正从低精度的简单搬运,向CNC上下料、内存条插拔等高精度的场景升级。面对移动机器人到位偏差、地面不平等复杂工况,保持高精度作业成为行业挑战。针对上述挑战,SC5000X系列智能相机推出了专用的多位姿抓取方案。通过自研多位姿抓取算法,精准补偿6自由度位姿偏移,方案综合成本低,可快速适配复杂环境,实现高精度柔性作业,助力用户降本增效,同时得益于SC智能相机的软硬件深度集成,该方案在产品部署与安装环节同样表现出色,为行业提供了高效可靠的集成解决方案。
2511 4 2026-02-10
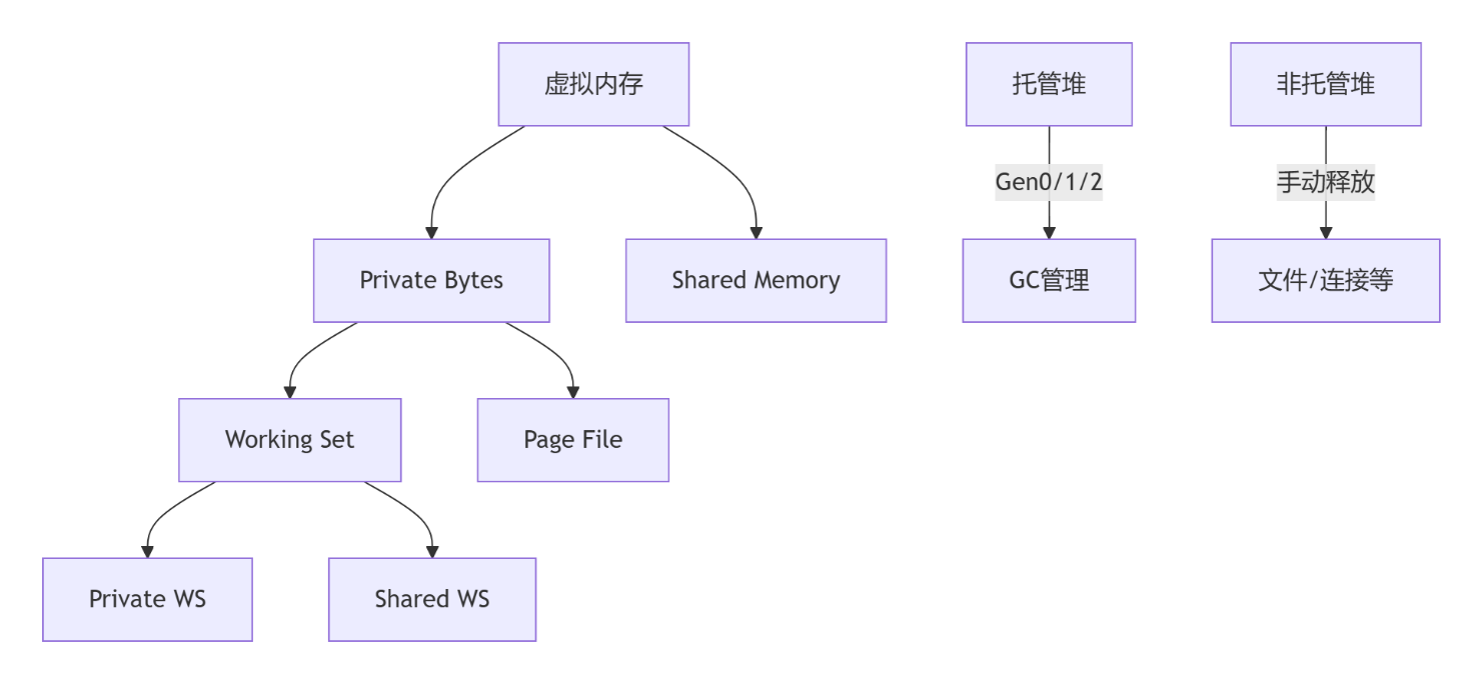
【开发有道系列】内存泄漏分析与案例精讲
详细介绍.NET托管堆内存、非托管堆内存、三代托管堆内存(Gen0/1/2),提交内存(PrivateBytes)、工作集(WorkingSet)、共享内存、虚拟内存等概念与指标,并结合具体案例,介绍内存泄漏分析方法与内存优化技巧。
1432 2 2026-01-23
【2D算法系列】基于投影分析的字符分割算法实现详解
在OCR(光学字符识别)系统中,字符分割是一个重要的预处理步骤。它的目标是将文本行图像分割成单个字符的图像,以便后续的字符识别以及动态字符缺陷检测。本文实现了一个基于投影分析的字符分割算法模块,该模块可以集成到字符识别以及字符缺陷检测系统中。
1871 6 2025-11-11
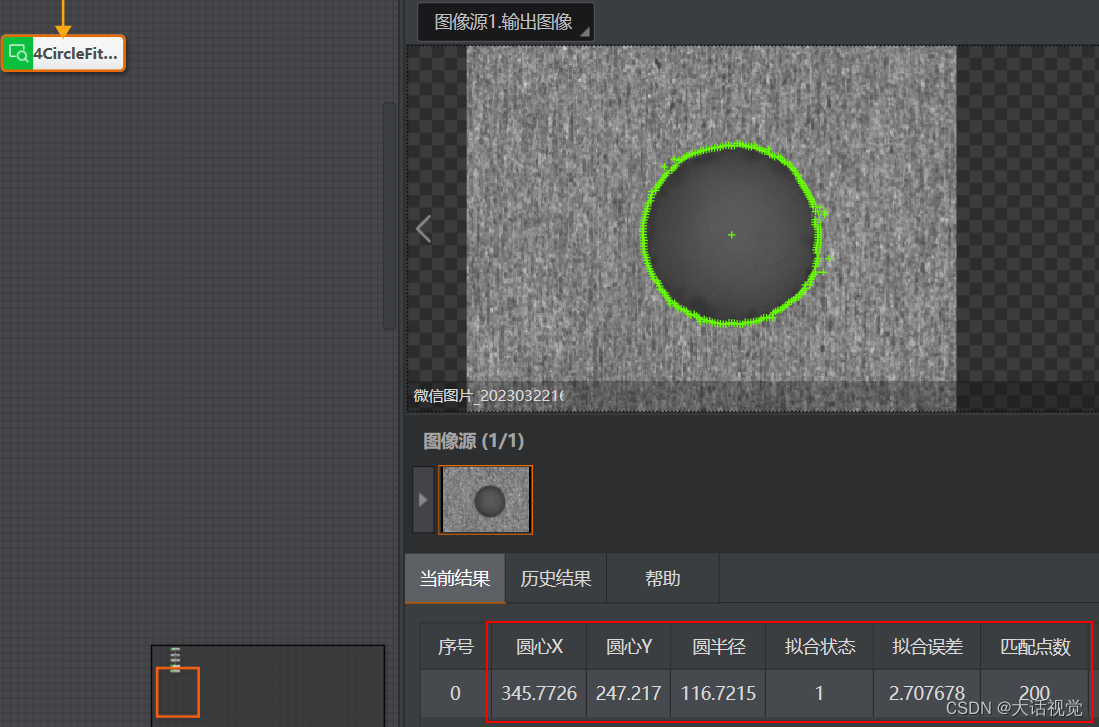
【2D算法系列】圆拟合算法剖析与硬核实战
顾名思义,圆拟合是从给定的点集数据中拟合出一个圆。机器视觉(或是计算机视觉)领域,主流的圆拟合算法有最小二乘法、迭代重加权最小二乘法、非线性优化法等。本文将对上述算法原理进行深入剖析,并硬核实战。文章编辑器对公式支持不友好,显示异常,因此部分公式用截图替代,希望V社区管理员能推动改进。
7917 23 2 2025-01-06
【3D系列】2D-3D定位引导算法原理及实现
通常将使用2D相机求解6D位姿问题,称为2D-3D定位引导问题。本文主要介绍2D-3D定位引导算法原理以及2D标定、3D标定两种技术路线,尤其适用于复合机器人应用场景。
4526 9 1 2024-12-31
【开发有道系列】从0到1开发算法模块
本文将从算法模块开发的意义、架构与组成要素、开发流程与步骤、集成第三方库、版本升级、开发常见问题与解决措施方面详细介绍算法模块的封装,帮助开发者熟练掌握算法模块开发流程与常见问题解决措施,提升算法封装能力。【保姆级教程】算法模块封装详解一文的升级版,新增子界面开发、模块二次开发、自定义错误码等内容,并更新部分内容。
7588 8 3 2024-12-23
【开发有道系列】C++与C#相互调用的方法
封装C++算法模块,但部分功能需要调用C#库;使用C#脚本模块,但调用库为C++编写(业务保密,算法库多为C++库),此时C++与C#的互相调用不可避免。本文将介绍C++与C#相互调用的方法。
3295 11 3 2024-11-19
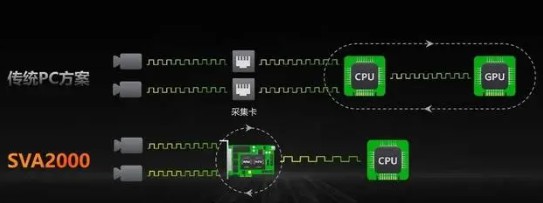
【重磅!智能视觉处理卡】SVA2000二次开发保姆级教程
为降低AI应用成本,海康将VM架构与AI硬件平台紧密结合,进行软硬件协同创新与集成化设计,开发出多个系列的AI边缘视觉产品,其中最核心的产品是AI视觉处理卡SVA2000。SVA2000基于高性能嵌入式处理芯片开发,拥有强大的运算性能。产品通过PCIE插槽接入工控机,内嵌入Linux系统,自带VM算法平台、显卡资源、加密资源等,轻松满足视觉检测需求,快速完成视觉系统的搭建。近期,全球机器视觉领域权威媒体《视觉系统设计》在深圳举办创新奖(VSDCInnovatorsAwards2024)颁奖典礼,SVA2000荣获金奖。本文将介绍其二次开发流程。
2529 1 2024-11-19
【3D系列】我们用2D相机实现3D无序抓取了
经过几个不眠夜的(下班后继续搬砖不容易)原理推导、算法开发、模块封装、硬件搭建、实际场景测试,我们验证了2D相机实现3D无序抓取的整套算法流程。经过独家优化的相机立体标定与手眼标定算法,让2D相机也能实现较高精度无序抓取,实验室验证精度达到1mm。本文将介绍2D相机实现3D无序抓取的全流程,以及三个自研算法模块的使用方法。
9183 32 13 2024-10-21
【保姆级教程】算法模块封装详解
VM自带模块生成工具能够辅助开发者进行算法的封装内嵌,可以预生成大部分接口代码,开发者利用该工具,只需要简单的三步操作就可以将算法封装成可交互的平台模块,极大缩短了开发周期。本文将从算法模块开发的意义、架构与组成要素、开发流程与步骤、集成第三方库、版本升级、开发常见问题与解决措施方面详细介绍算法模块的封装,帮助开发者熟练掌握算法模块开发流程与常见问题解决措施,提升算法封装能力。
10984 26 5 2024-10-17
【智能相机】SC6500-AI-WID二次开发
SC6500-AI-WID晶圆ID读取设备拥有18路光源、内嵌VM算法系统、显卡资源等,通过客户端搭建视觉处理流程,适用于半导体行业晶圆字符识别等业务需求。本文将介绍如何基于晶圆ID读取设备和嵌入式VM服务包,开发晶圆字符识别软件。
2591 3 2024-10-15
【VM跨平台开发】SC6500(SC6050)_SVA_WindowsVM二次开发流程与差异
目前,VisionMaster算法平台推出了Windows版本和嵌入式版本,其中Windows版本包括VM4.0~VM4.4,嵌入式版本内置于硬件,可分为智能相机版(SC)、智能视觉处理卡版(SVA)、智能视觉控制器(SVC)。目前Windows版本、SVA、SC版本(仅限于部分类型)VM均支持二次开发。本文将从环境配置、硬件连接与密码校验、方案加载和接管、控件绑定和流程运行、结果获取几个维度对比不同版本VM的二次开发流程与差异,避免代码跨平台迁移时“踩坑”。
5543 5 2 2024-10-15
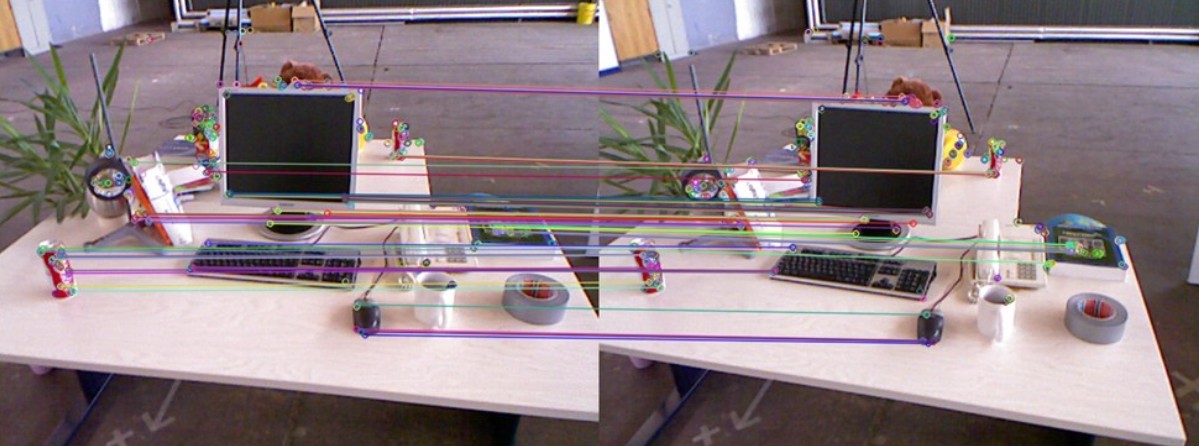
【3D系列】2D-2D对极几何估计相机运动3D位姿
当相机为单目时,我们只知道2D的像素坐标,能否根据两组2D点估计相机运动?本文将介绍利用对极几何实现2D-2D点估计相机运动3D位姿。
3994 6 1 2024-10-14
您正在使用的浏览器版本过低,请升级最新版本以获得更好的体验。
推荐使用以下浏览器











 浙公网安备 33010802013223号
浙公网安备 33010802013223号